|
|
1、主要内容
- 熟练使用pipe进行父子进程间通信
- 熟练使用pipe进行兄弟进程间通信
- 熟练使用fifo进行无血缘关系的进程间通信
- 使用mmap进行有或无血缘关系的进程间通信
2、进程间通信相关概念
2.1 什么是进程间通信
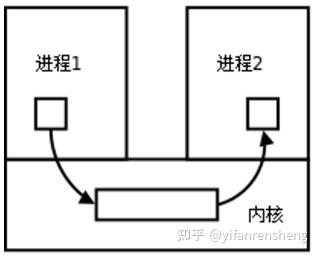
Linux环境下,进程地址空间相互独立,每个进程各自有不同的用户地址空间。任何一个进程的全局变量在另一个进程中都看不到,所以进程和进程之间不能相互访问,要交换数据必须通过内核,如下图所示,在内核中开辟一块缓冲区,进程1把数据从用户空间拷到内核缓冲区,进程2再从内核缓冲区把数据读走,内核提供的这种机制称为进程间通信(IPC,InterProcess Communication)。
2.2 进程间通信的方式
在进程间完成数据传递需要借助操作系统提供特殊的方法,如:文件、管道、信号、共享内存、消息队列、套接字、命名管道等。随着计算机的蓬勃发展,一些方法由于自身设计缺陷被淘汰或者弃用。现今常用的进程间通信方式有:
- 管道(使用最简单)
- 信号(开销最小)
- 共享映射区(无血缘关系)
- 本地套接字(最稳定)
3、管道-pipe
3.1 管道的概念
管道是一种最基本的IPC机制,也称匿名管道,应用于有血缘关系的进程之间,完成数据传递。调用pipe函数即可创建一个管道。
有如下特质:
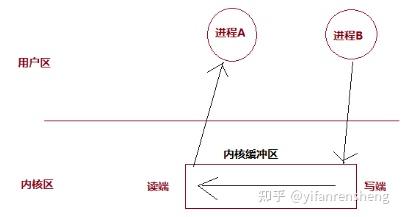
- 管道的本质是一块内核缓冲区
- 由两个文件描述符引用,一个表示读端,一个表示写端。
- 规定数据从管道的写端流入管道,从读端流出。
- 当两个进程都终结的时候,管道也自动消失。
- 管道的读端和写端默认都是阻塞的。
3.2 管道的原理
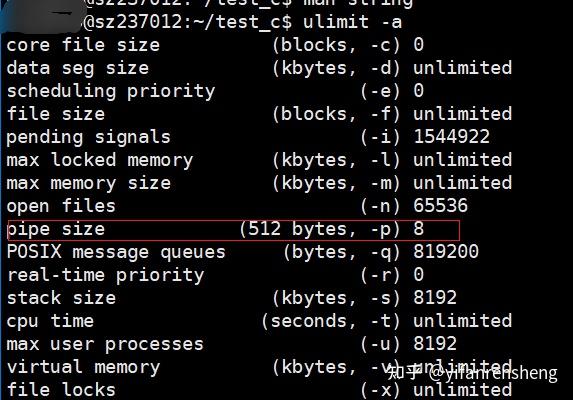
- 管道的实质是内核缓冲区,内部使用环形队列实现。
- 默认缓冲区大小为4K,可以使用ulimit -a命令获取大小。
3.3 管道的局限性
- 数据一旦被读走,便不在管道中存在,不可反复读取。
- 数据只能在一个方向上流动,若要实现双向流动,必须使用两个管道
- 只能在有血缘关系的进程间使用管道。
3.4 创建管道-pipe函数
- 函数作用:创建一个管道
- 函数原型:int pipe(int fd[2]);
- 函数参数:若函数调用成功,fd[0]存放管道的读端,fd[1]存放管道的写端
- 返回值:
函数调用成功返回读端和写端的文件描述符,其中fd[0]是读端, fd[1]是写端,向管道读写数据是通过使用这两个文件描述符进行的,读写管道的实质是操作内核缓冲区。
管道创建成功以后,创建该管道的进程(父进程)同时掌握着管道的读端和写端。如何实现父子进程间通信呢?
3.5 父子进程使用管道通信
一个进程在由pipe()创建管道后,一般再fork一个子进程,然后通过管道实现父子进程间的通信(因此也不难推出,只要两个进程中存在血缘关系,这里的血缘关系指的是具有共同的祖先,都可以采用管道方式来进行通信)。父子进程间具有相同的文件描述符,且指向同一个管道pipe,其他没有关系的进程不能获得pipe()产生的两个文件描述符,也就不能利用同一个管道进行通信。
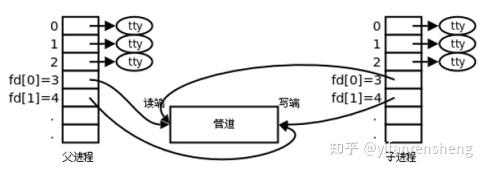
第一步:父进程创建管道
第二步:父进程fork出子进程
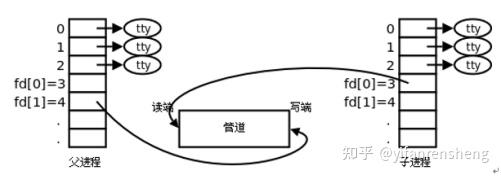
第三步:父进程关闭fd[0],子进程关闭fd[1]
创建步骤总结:
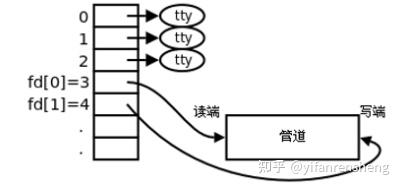
- 父进程调用pipe函数创建管道,得到两个文件描述符fd[0]和fd[1],分别指向管道的读端和写端。
- 父进程调用fork创建子进程,那么子进程也有两个文件描述符指向同一管。
- 父进程关闭管道读端,子进程关闭管道写端。父进程可以向管道中写入数据,子进程将管道中的数据读出,这样就实现了父子进程间通信。
3.6 管道练习
- 一个进程能否使用管道完成读写操作呢? 可以,但是没有意义;
- 使用管道完成父子进程间通信?
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
int main()
{
//创建管道
//int pipe(int pipefd[2]);
int fd[2];
int ret = pipe(fd);
if(ret<0)
{
perror(&#34;pipe error&#34;);
return -1;
}
//创建子进程
pid_t pid = fork();
if(pid<0)
{
perror(&#34;fork error&#34;);
return -1;
}
else if(pid>0)
{
//关闭读端
close(fd[0]);
sleep(5);//演示等待效果
write(fd[1], &#34;hello world&#34;, strlen(&#34;hello world&#34;));
wait(NULL); //阻塞,防止父进程先挂
}
else
{
//关闭写端
close(fd[1]);
char buf[64];
memset(buf, 0x00, sizeof(buf));
int n = read(fd[0], buf, sizeof(buf));
printf(&#34;read over, n==[%d], buf==[%s]\n&#34;, n, buf);
}
return 0;
}结果:
[root@ae832bd6d3df process_con_C]# ./pipe
read over, n==[11], buf==[hello world]
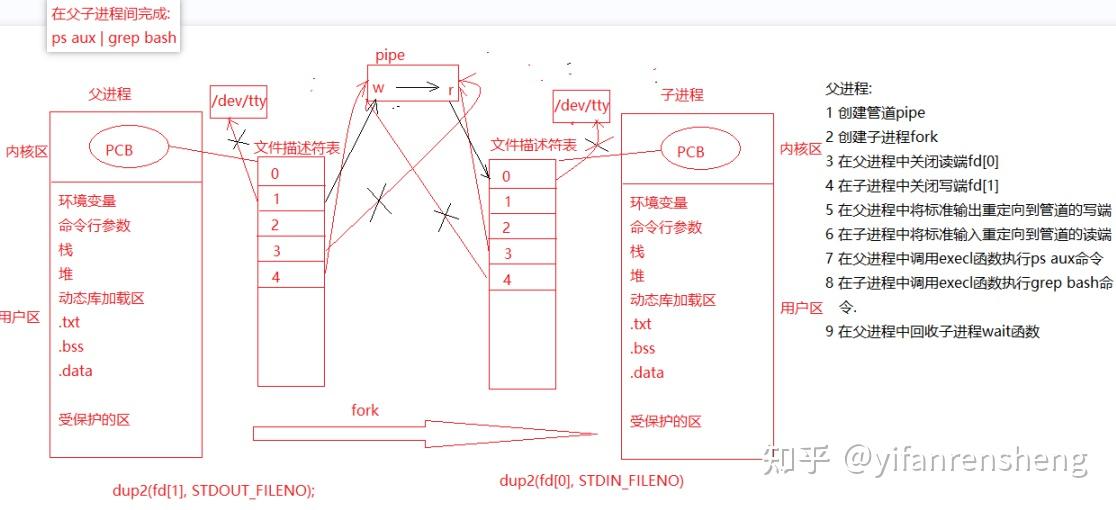
- 父子进程间通信, 实现 ps aux | grep bash 使用【C-34】C语言文件和相关操作 介绍的 execlp 函数和 dup2 函数
pip_copy.c
//使用pipe完成ps aux | grep bash操作
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
int main()
{
//创建管道
//int pipe(int pipefd[2]);
int fd[2];
int ret = pipe(fd);
if(ret<0)
{
perror(&#34;pipe error&#34;);
return -1;
}
//创建子进程
pid_t pid = fork();
if(pid<0)
{
perror(&#34;fork error&#34;);
return -1;
}
else if(pid>0)
{
//关闭读端
close(fd[0]);
//将标准输出重定向到管道的写端
dup2(fd[1], STDOUT_FILENO);
execlp(&#34;ps&#34;, &#34;ps&#34;, &#34;aux&#34;, NULL);
perror(&#34;execlp error&#34;); //execlp执行成功不会执行这句
}
else
{
//关闭写端
close(fd[1]);
//将标准输入重定向到管道的读端
dup2(fd[0], STDIN_FILENO);
execlp(&#34;grep&#34;, &#34;grep&#34;, &#34;--color=auto&#34;, &#34;bash&#34;, NULL);
perror(&#34;execlp error&#34;);
}
return 0;
}
[root@ae832bd6d3df process_con_C]# ./pip_copy
root 1 0.0 0.0 11696 2808 pts/0 Ss+ Nov10 0:00 bash /u02/app/seg/rtc1dm_entrypoint.sh
root 75 0.0 0.0 11832 3004 pts/1 Ss+ Nov10 0:00 /bin/bash
root 131 0.0 0.0 11964 3188 pts/2 Ss Nov11 0:00 /bin/bash
root 1043 0.0 0.0 11832 3004 pts/3 Ss+ Nov14 0:00 /bin/bash
root 1325 0.0 0.0 9100 852 pts/2 S+ 01:01 0:00 grep --color=auto bash
- 兄弟进程间通信, 实现ps aux | grep bash 使用execlp函数和dup2函数
父进程要调用waitpid函数完成对子进程的回收
3.7 管道的读写行为
1)读操作
- 有数据 read正常读,返回读出的字节数
- 无数据 写端全部关闭
- read解除阻塞,返回0, 相当于读文件读到了尾部
- 没有全部关闭 read阻塞,下面代码及时这种情况
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
int main()
{
//创建管道
//int pipe(int pipefd[2]);
int fd[2];
int ret = pipe(fd);
if(ret<0)
{
perror(&#34;pipe error&#34;);
return -1;
}
//close(fd[0]);
//write(fd[1], &#34;hello world&#34;, strlen(&#34;hello world&#34;));
//关闭写端
// close(fd[1]);
char buf[64];
memset(buf, 0x00, sizeof(buf));
int n = read(fd[0], buf, sizeof(buf));
printf(&#34;read over, n==[%d], buf==[%s]\n&#34;, n, buf);
return 0;
}2)写操作
- 读端全部关闭 管道破裂,进程终止, 内核给当前进程发SIGPIPE信号
- 读端没全部关闭
- 缓冲区写满了 write阻塞
- 缓冲区没有满 继续write
3.8 如何设置管道为非阻塞
默认情况下,管道的读写两端都是阻塞的,若要设置读或者写端为非阻塞,则可参考下列三个步骤进行:
- 第1步: int flags = fcntl(fd[0], F_GETFL, 0);
- 第2步: flag |= O_NONBLOCK;
- 第3步: fcntl(fd[0], F_SETFL, flags);
若是读端设置为非阻塞:
- 情形1:写端没有关闭,管道中没有数据可读,则read返回-1;
- 情形2:写端没有关闭,管道中有数据可读,则read返回实际读到的字节数
- 情形3:写端已经关闭,管道中有数据可读,则read返回实际读到的字节数
- 情形4:写端已经关闭,管道中没有数据可读,则read返回0
pipe_01.c
通过设置属性控制非阻塞:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
int main()
{
//创建管道
//int pipe(int pipefd[2]);
int fd[2];
int ret = pipe(fd);
if(ret<0)
{
perror(&#34;pipe error&#34;);
return -1;
}
//write(fd[1], &#34;hello world&#34;, strlen(&#34;hello world&#34;));
//关闭写端
//close(fd[1]);
//设置管道的读端为非阻塞
int flag = fcntl(fd[0], F_GETFL);
flag |= O_NONBLOCK;
fcntl(fd[0], F_SETFL, flag);
char buf[64];
memset(buf, 0x00, sizeof(buf));
int n = read(fd[0], buf, sizeof(buf));
printf(&#34;read over, n==[%d], buf==[%s]\n&#34;, n, buf);
return 0;
}
[root@ae832bd6d3df process_con_C]# ./pipe_01
read over, n==[-1], buf==[]情形2和3:取消//write(fd[1], &#34;hello world&#34;, strlen(&#34;hello world&#34;)); 的注释,会出现下面的。(//close(fd[1]);是否注销不影响结果)
[root@ae832bd6d3df process_con_C]# ./pipe_01
read over, n==[11], buf==[hello world]情形3:取消//close(fd[1]); 的注解
[root@ae832bd6d3df process_con_C]# ./pipe_01
read over, n==[0], buf==[]3.9 如何查看管道缓冲区大小
- 命令 ulimit -a
- 函数 long fpathconf(int fd, int name); 可以使用man
- printf(&#34;pipe size==[%ld]\n&#34;, fpathconf(fd[0], _PC_PIPE_BUF));
- printf(&#34;pipe size==[%ld]\n&#34;, fpathconf(fd[1], _PC_PIPE_BUF));
在3.8的基础上增加上面两行,得到以下结果:
[root@ae832bd6d3df process_con_C]# ./pipe_01
pipe size==[4096]
pipe size==[4096]
read over, n==[0], buf==[]4、FIFO
4.1 FIFO介绍
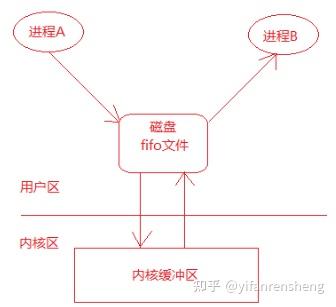
FIFO常被称为命名管道,以区分管道(pipe)。管道(pipe)只能用于“有血缘关系”的进程间通信。但通过FIFO,不相关的进程也能交换数据。
FIFO是Linux基础文件类型中的一种(文件类型为p,可通过ls -l查看文件类型)。但FIFO文件在磁盘上没有数据块,文件大小为0,仅仅用来标识内核中一条通道。进程可以打开这个文件进行read/write,实际上是在读写内核缓冲区,这样就实现了进程间通信。
4.2 创建管道
命令格式:mkfifo 管道名 例如:mkfifo myfifo
int mkfifo(const char *pathname, mode_t mode);
参数说明和返回值可以查看man 3 mkfifo
当创建了一个FIFO,就可以使用open函数打开它,常见的文件I/O函数都可用于FIFO。如:close、read、write、unlink等。FIFO严格遵循先进先出(first in first out),对FIFO的读总是从开始处返回数据,对它们的写则把数据添加到末尾。它们不支持诸如lseek()等文件定位操作。因为它的大小为0.
[root@ae832bd6d3df process_con_C]# mkfifo myfifo
[root@ae832bd6d3df process_con_C]# ls -lh
total 48K
prw-r--r-- 1 root root 0 Nov 16 05:25 myfifo
4.3 使用FIFO完成两个进程通信
思路:
- 进程A:
- 创建一个fifo文件:myfifo
- 调用open函数打开myfifo文件
- 调用write函数写入一个字符串如:“hello world”(其实是将数据写入到了内核缓冲区)
- 调用close函数关闭myfifo文件
- 进程B:
- 调用open函数打开myfifo文件
- 调用read函数读取文件内容(其实就是从内核中读取数据)
- 打印显示读取的内容
- 调用close函数关闭myfifo文件
注意:myfifo文件是在进程A中创建的,如果先启动进程B会报错。思考一下如何解决这个问题呢???
实验
fifo_read.c
//fifo完成两个进程间通信的测试
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/stat.h>
#include <fcntl.h>
int main()
{
//创建fifo文件
//int mkfifo(const char *pathname, mode_t mode);
//判断myfofo文件是否存在,若不存在则创建
int ret = access(&#34;./myfifo&#34;, F_OK);
if(ret!=0)
{
ret = mkfifo(&#34;./myfifo&#34;, 0777);
if(ret<0)
{
perror(&#34;mkfifo error&#34;);
return -1;
}
}
//打开文件
int fd = open(&#34;./myfifo&#34;, O_RDWR);
if(fd<0)
{
perror(&#34;open error&#34;);
return -1;
}
//读fifo文件
int n;
char buf[64];
while(1)
{
memset(buf, 0x00, sizeof(buf));
n = read(fd, buf, sizeof(buf));
printf(&#34;n==[%d], buf==[%s]\n&#34;, n, buf);
}
//关闭文件
close(fd);
//getchar();
return 0;
}fifo_write.c
//fifo完成两个进程间通信的测试
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/stat.h>
#include <fcntl.h>
int main()
{
//创建fifo文件
//int mkfifo(const char *pathname, mode_t mode);
int ret = access(&#34;./myfifo&#34;, F_OK);
if(ret!=0)
{
ret = mkfifo(&#34;./myfifo&#34;, 0777);
if(ret<0)
{
perror(&#34;mkfifo error&#34;);
return -1;
}
}
//打开文件
int fd = open(&#34;./myfifo&#34;, O_RDWR);
if(fd<0)
{
perror(&#34;open error&#34;);
return -1;
}
//写fifo文件
int i = 0;
char buf[64];
while(1)
{
memset(buf, 0x00, sizeof(buf));
sprintf(buf, &#34;%d:%s&#34;, i, &#34;hello world&#34;);
write(fd, buf, strlen(buf));
sleep(1);
i++;
}
//关闭文件
close(fd);
//getchar();
return 0;
}开启两个窗口
[root@ae832bd6d3df process_con_C]# ./fifo_write
[root@ae832bd6d3df process_con_C]# ./fifo_read
n==[64], buf==[0:hello world]
n==[64], buf==[1:hello world]
n==[64], buf==[2:hello world]
n==[64], buf==[3:hello world]
n==[64], buf==[4:hello world]
n==[64], buf==[5:hello world]
^C
[root@ae832bd6d3df process_con_C]# ./fifo_read
n==[64], buf==[6:hello world]
n==[64], buf==[7:hello world]
5、内存映射区
5.1 存储映射区介绍
存储映射I/O (Memory-mapped I/O) 是一个磁盘文件与存储空间中的一个缓冲区相映射。从缓冲区中取数据,就相当于读文件中的相应字节;将数据写入缓冲区,则会将数据写入文件。这样,就可在不使用read和write函数的情况下,使用地址(指针)完成I/O操作。
使用存储映射这种方法,首先应通知内核,将一个指定文件映射到存储区域中。这个映射工作可以通过mmap函数来实现。
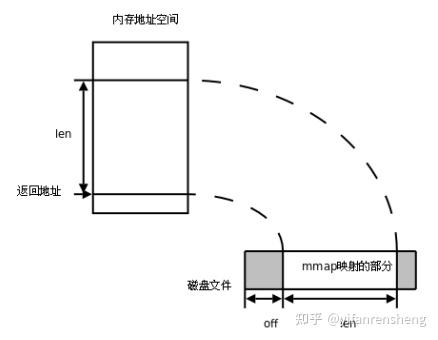
5.2 mmap函数
- 函数作用: 建立存储映射区
- 函数原型 void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset);
- 函数返回值:
- 成功:返回创建的映射区首地址;
- 失败:MAP_FAILED宏
- 参数:
- addr: 通常设为NULL, 指定映射的起始地址, 由系统指定
- length:映射到内存的文件长度。这个值的获取一般是用lseek或者stat函数。参数要映射的文件大小> 0
- prot: 映射区的保护方式, 最常用的:
- 读:PROT_READ
- 写:PROT_WRITE
- 读写:PROT_READ | PROT_WRITE
- flags: 映射区的特性, 可以是
- MAP_SHARED: 写入映射区的数据会写回文件, 且允许其他映射该文件的进程共享。(可以对文件进行修改)
- MAP_PRIVATE: 对映射区的写入操作会产生一个映射区的复制(copy-on-write), 对此区域所做的修改不会写回原文件。
- fd:由open返回的文件描述符, 代表要映射的文件。
- offset:以文件开始处的偏移量, 必须是4k的整数倍, 通常为0, 表示从文件头开始映射。
实验1
//使用mmap函数完成父子进程间通信
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/mman.h>
int main()
{
//使用mmap函数建立共享映射区
//void *mmap(void *addr, size_t length, int prot, int flags,
// int fd, off_t offset);
int fd = open(&#34;./test.log&#34;, O_RDWR);
if(fd<0)
{
perror(&#34;open error&#34;);
return -1;
}
int len = lseek(fd, 0, SEEK_END);
void * addr = mmap(NULL, len, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0);
//void * addr = mmap(NULL, len, PROT_READ|PROT_WRITE, MAP_PRIVATE, fd, 0);
if(addr==MAP_FAILED)
{
perror(&#34;mmap error&#34;);
return -1;
}
close(fd);
//创建子进程
pid_t pid = fork();
if(pid<0)
{
perror(&#34;fork error&#34;);
return -1;
}
else if(pid>0)
{
memcpy(addr, &#34;hello world&#34;, strlen(&#34;hello world&#34;));
wait(NULL);
}
else if(pid==0)
{
sleep(1);
char *p = (char *)addr;
printf(&#34;[%s]&#34;, p);
}
return 0;
}
//使用MAP_SHARED编译后生成的结果
[root@ae832bd6d3df process_con_C]# ./mmap1
[hello worldyyyyyyyyyyyyyyyyyy
yyyyyyyyyyyyyyyyyyyyyyyyyyyyy
//使用MAP_PRIVATE编译后生成的结果
[root@ae832bd6d3df process_con_C]# ./mmap1
[yyyyyyyyyyyyyyyyyyyyyyyyyyyyy
yyyyyyyyyyyyyyyyyyyyyyyyyyyyy实验2
mmap_read.h
//使用mmap函数完成两个不相干进程间通信
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/mman.h>
int main()
{
//使用mmap函数建立共享映射区
//void *mmap(void *addr, size_t length, int prot, int flags, int fd, off_t offset);
int fd = open(&#34;./test.log&#34;, O_RDWR);
if(fd<0)
{
perror(&#34;open error&#34;);
return -1;
}
int len = lseek(fd, 0, SEEK_END);
//建立共享映射区
void * addr = mmap(NULL, len, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0);
if(addr==MAP_FAILED)
{
perror(&#34;mmap error&#34;);
return -1;
}
char buf[64];
memset(buf, 0x00, sizeof(buf));
memcpy(buf, addr, 10);
printf(&#34;buf=[%s]\n&#34;, buf);
return 0;
}mmap_write.h
//使用mmap函数完成两个不相干进程间通信
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/mman.h>
int main()
{
//使用mmap函数建立共享映射区
//void *mmap(void *addr, size_t length, int prot, int flags,
// int fd, off_t offset);
int fd = open(&#34;./test.log&#34;, O_RDWR);
if(fd<0)
{
perror(&#34;open error&#34;);
return -1;
}
int len = lseek(fd, 0, SEEK_END);
//建立共享映射区
void * addr = mmap(NULL, len, PROT_READ|PROT_WRITE, MAP_SHARED, fd, 0);
if(addr==MAP_FAILED)
{
perror(&#34;mmap error&#34;);
return -1;
}
memcpy(addr, &#34;0123456789&#34;, 10);
return 0;
}结果
[root@ae832bd6d3df process_con_C]# ./mmap_write
[root@ae832bd6d3df process_con_C]# ./mmap_read
buf=[0123456789]5.3 munmap函数
- 函数作用: 释放由mmap函数建立的存储映射区
- 函数原型: int munmap(void *addr, size_t length)
- 返回值:
- 函数参数:
- addr:调用mmap函数成功返回的映射区首地址
- length:映射区大小(mmap函数的第二个参数)
5.4 mmap注意事项
- 创建映射区的过程中,隐含着一次对映射文件的读操作,将文件内容读取到映射区
- 当MAP_SHARED时,要求:映射区的权限应 <=文件打开的权限(出于对映射区的保护)。而MAP_PRIVATE则无所谓,因为mmap中的权限是对内存的限制
- 映射区的释放与文件关闭无关,只要映射建立成功,文件可以立即关闭。 5.2的实验1已经验证
- 特别注意,当映射文件大小为0时,不能创建映射区。所以,用于映射的文件必须要有实际大小;mmap使用时常常会出现总线错误,通常是由于共享文件存储空间大小引起的
- munmap传入的地址一定是mmap的返回地址。坚决杜绝指针++操作
- 文件偏移量必须为0或者4K的整数倍。这里指的是 mmap 的offset,通常设置为0
- mmap创建映射区出错概率非常高,一定要检查返回值,确保映射区建立成功再进行后续操作
5.5 mmap函数相关思考题
- 可以open的时候O_CREAT一个新文件来创建映射区吗? --不行
- 如果open时O_RDONLY, mmap时PROT参数指定PROT_READ|PROT_WRITE会怎样? --不行,因为open的权限要大于等于 mmap的权限
- mmap映射完成之后, 文件描述符关闭,对mmap映射有没有影响? --没有影响
- 如果文件偏移量为1000会怎样? --报错,只能是4K的整数倍,一般设置为0
- 对mem越界操作会怎样? --报错
- 如果mem++,munmap可否成功? --不会成功
- mmap什么情况下会调用失败? --上面的几种情况都是可能会调用失败的
- 如果不检测mmap的返回值,会怎样? --若是失败,会影响后面操作
5.7 mmap函数的匿名形式
使用mmap函数建立匿名映射:只能用于有血缘关系的进程之间
mmap(NULL, 4096, PROT_READ | PROT_WRITE, MAP_SHARED | MAP_ANONYMOUS, -1, 0)
- MAP_ANONYMOUS 需要配合MAP_SHARED 一起使用
- fd改成-1,不用额外去打开文件
实验:对比本节的实验1
mmap_anony.c
//使用mmap匿名映射完成父子进程间通信
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <unistd.h>
#include <sys/wait.h>
#include <fcntl.h>
#include <sys/stat.h>
#include <sys/mman.h>
int main()
{
//使用mmap函数建立共享映射区
//void *mmap(void *addr, size_t length, int prot, int flags,
// int fd, off_t offset);
void * addr = mmap(NULL, 4096, PROT_READ|PROT_WRITE, MAP_SHARED | MAP_ANONYMOUS, -1, 0);
if(addr==MAP_FAILED)
{
perror(&#34;mmap error&#34;);
return -1;
}
//创建子进程
pid_t pid = fork();
if(pid<0)
{
perror(&#34;fork error&#34;);
return -1;
}
else if(pid>0)
{
memcpy(addr, &#34;hello world&#34;, strlen(&#34;hello world&#34;));
wait(NULL);
}
else if(pid==0)
{
sleep(1);
char *p = (char *)addr;
printf(&#34;[%s]&#34;, p);
}
return 0;
}结果:
[root@ae832bd6d3df process_con_C]# ./mmap_anony
[hello world]5.8 mmap应用练习
图解说明
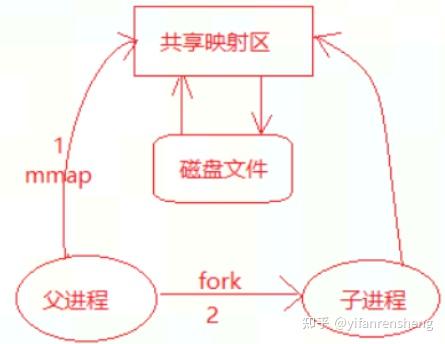
思路
- 调用mmap函数创建存储映射区,返回映射区首地址ptr
- 调用fork函数创建子进程,子进程也拥有了映射区首地址
- 父子进程可以通过映射区首地址指针ptr完成通信
- 调用munmap函数释放存储映射区
6、实验
6.1 兄弟进程pipe通信,和3.6类似
pipe_brother.c
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/types.h>
#include <sys/wait.h>
#include <unistd.h>
#include <errno.h>
int main()
{
int fd[2];
int ret;
pid_t pid;
//创建一个管道
ret = pipe(fd);
if(ret<0)
{
perror(&#34;pipe error&#34;);
return -1;
}
int i = 0;
int n = 2;
for(i=0; i<n; i++)
{
//创建子进程
pid = fork();
if(pid<0)
{
perror(&#34;fork error&#34;);
return -1;
}
else if(pid==0)
{
break;
}
}
if(i==n)
{ //父进程中关闭管道,只做子进程回收
close(fd[0]);
close(fd[1]);
pid_t wpid;
int status;
while(1)
{
//等待回收子进程
wpid = waitpid(-1, &status, WNOHANG); //不阻塞地回收所有进程
if(wpid==0) //没有子进程退出
{
sleep(1); //可加可不加,避免大量重复循环
continue;
}
else if(wpid==-1) //已经没有子进程
{
printf(&#34;no child is living, wpid==[%d]\n&#34;, wpid);
exit(0);
}
else if(wpid>0)
{
if(WIFEXITED(status)) //正常退出
{
printf(&#34;child normal exited, status==[%d]\n&#34;, WEXITSTATUS(status));
}
else if(WIFSIGNALED(status)) //被信号杀死
{
printf(&#34;child killed by signo==[%d]\n&#34;, WTERMSIG(status));
}
}
}
}
//第一个子进程
if(i==0)
{
close(fd[0]);
//将标准输出重定向到管道到写端
dup2(fd[1], STDOUT_FILENO);
execlp(&#34;ps&#34;, &#34;ps&#34;, &#34;aux&#34;, NULL);
perror(&#34;execlp error&#34;);
close(fd[1]);
}
//第二个子进程
if(i==1)
{
printf(&#34;child: fpid==[%d], cpid==[%d]\n&#34;, getppid(), getpid());
close(fd[1]);
//将标准输入重定向到管道到读端
dup2(fd[0], STDIN_FILENO);
execlp(&#34;grep&#34;, &#34;grep&#34;, &#34;--color&#34;, &#34;bash&#34;, NULL);
perror(&#34;execlp error&#34;);
close(fd[0]);
}
return 0;
}
[root@ae832bd6d3df process_con_C]# ./pipe_brother
child: fpid==[1554], cpid==[1556]
root 1 0.0 0.0 11696 2808 pts/0 Ss+ Nov10 0:00 bash /u02/app/seg/rtc1dm_entrypoint.sh
root 75 0.0 0.0 11832 3004 pts/1 Ss+ Nov10 0:00 /bin/bash
root 131 0.0 0.0 11964 3188 pts/2 Ss Nov11 0:01 /bin/bash
root 1043 0.0 0.0 11832 3008 pts/3 Ss+ Nov14 0:00 /bin/bash
root 1556 0.0 0.0 9100 836 pts/2 S+ 13:05 0:00 grep --color bash |
|



 发表于 2022-9-22 12:16:44
发表于 2022-9-22 12:16:44