|
|
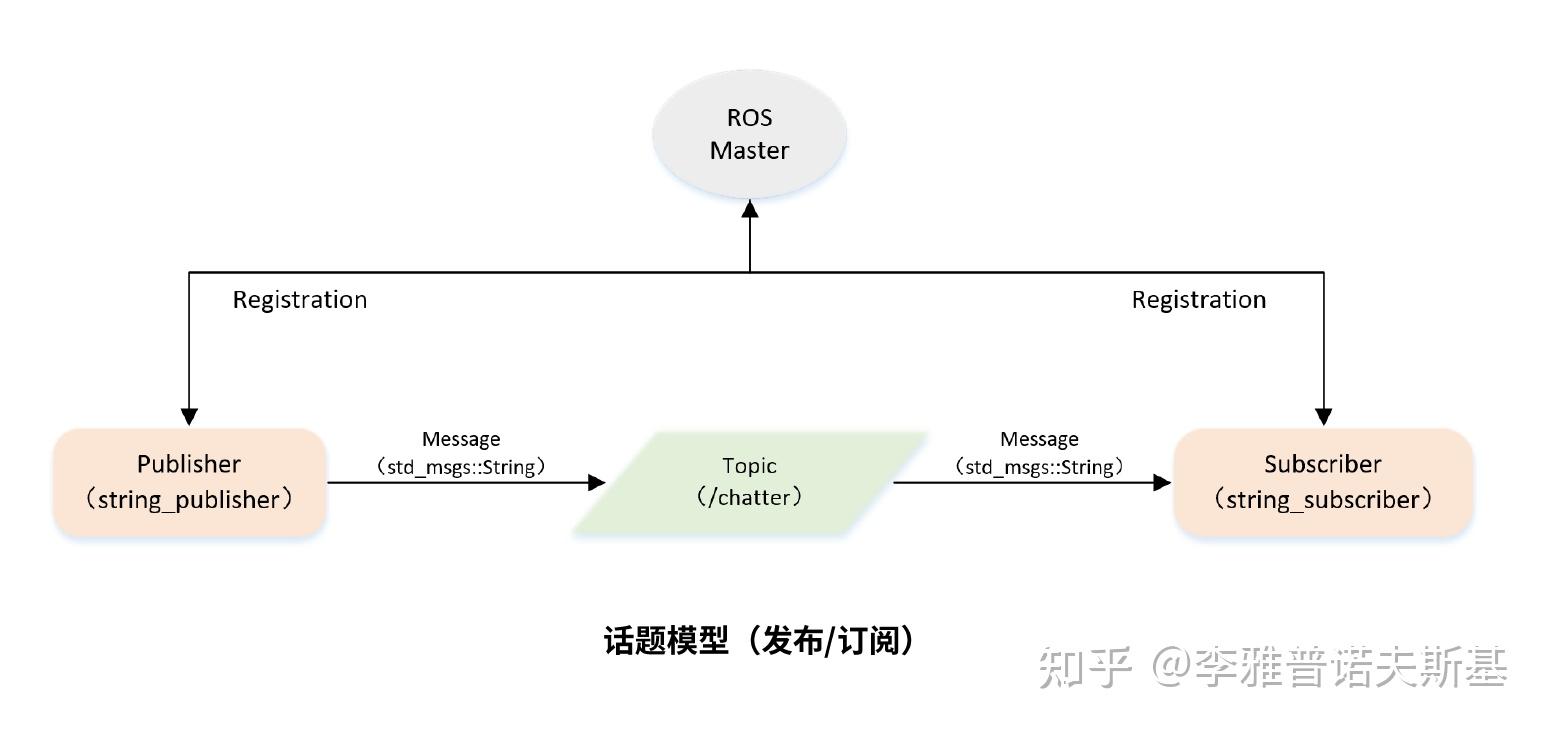
话题模型
1. Publisher发布者
如何实现一个发布者?
- 初始化一个ROS节点
- 向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型
- 创建消息数据
- 按照一定频率循环发布消息
代码如下
/**
* 该例程将发布chatter话题,消息类型String
*/
#include <sstream>
#include &#34;ros/ros.h&#34; //所有ros程序都需要包含的头文件
#include &#34;std_msgs/String.h&#34;
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, &#34;string_publisher&#34;); //声明节点名字为string_publisher(不能和其他节点重名)
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String
ros::Publisher chatter_pub = n.advertise<std_msgs::String>(&#34;chatter&#34;, 1000); // 1000代表缓冲区大小
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化std_msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss << &#34;hello world &#34; << count;
msg.data = ss.str();
// 发布消息
ROS_INFO(&#34;%s&#34;, msg.data.c_str());
chatter_pub.publish(msg);
// 按照循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}
<hr/>2. Subscriber订阅者
如何实现一个订阅者?
- 初始化一个ROS节点
- 订阅需要的话题
- 循环等待话题消息,接收到消息后进入回调函数
- 在回调函数中完成后消息处理
代码如下
/**
* 该例程将订阅/person_info话题,自定义消息类型learning_communication::PersonMsg
*/
#include <ros/ros.h>
#include &#34;learning_communication/PersonMsg.h&#34;
// 接收到订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_communication::PersonMsg::ConstPtr& msg)
{
// 将接收到的消息打印出来
ROS_INFO(&#34;Subcribe Person Info: name:%s age:%d sex:%d&#34;,
msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, &#34;person_subscriber&#34;);
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe(&#34;/person_info&#34;, 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
} |
|



 发表于 2022-12-28 13:15:22
发表于 2022-12-28 13:15:22